Circuit Squirrels
FLL Team #60911
FLL Team #60911
See how the Circuit Squirrels have grown over the seasons!
For our Innovation Project, we worked together to solve a real problem archaeologists face in the field:
carrying heavy tools across hot, uneven ground. After researching online, going on field trips,
and talking with archaeologists and experts, we designed a lightweight,
portable sifter that is easy to carry and use. We tested different materials,
screen sizes, and folding designs, built several prototypes, and improved them through hands-on testing.
In the end, we created a durable, foldable sifter that is easy to transport and can hold up to 10 pounds.
We also built a strong and reliable competition robot. We chose high-point missions, tested multiple designs,
and selected a cube-style drive base that is easy to control and works well with attachments. We created simple,
quick-change attachments and programmed the robot in Python with a gyro sensor for better accuracy.
After lots of testing and improvements, we are now able to complete all 15 missions and score over 500 points.
We had a fantastic season, made it to the states competition, and placed second in robot performance with a score of 510.

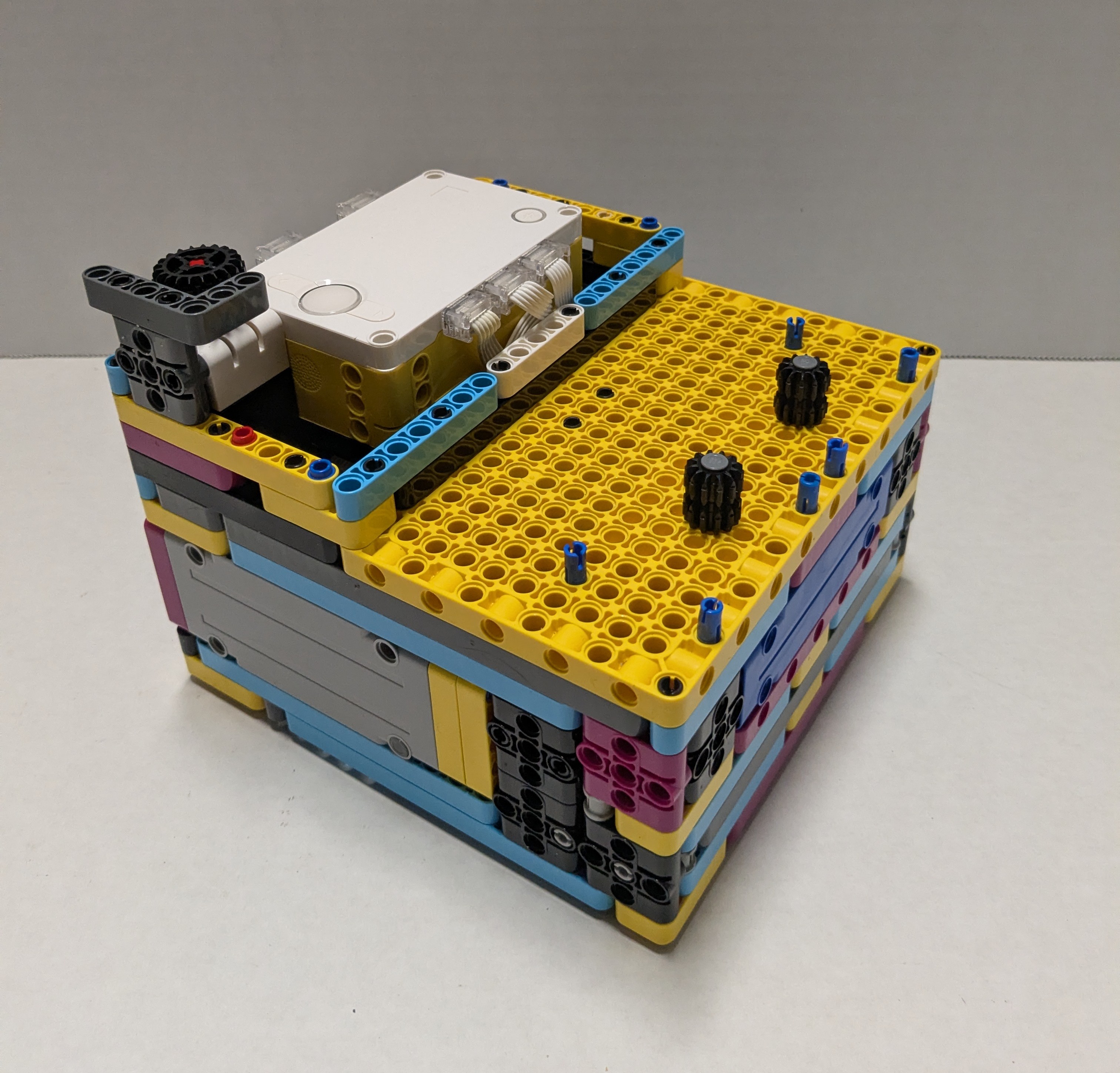
Our team designed a strong and reliable competition robot. We started by choosing the missions that would earn the most points in the limited time, then built and tested multiple robot designs before selecting a cube-style drive base that is easy to control and works well with attachments. We created simple, quick-change attachments and programmed the robot using Python, with a gyro sensor to improve accuracy and consistency. Through lots of testing, we achieved high reliability. If all goes well, we are now able to complete all 15 missions and score over 500 points.
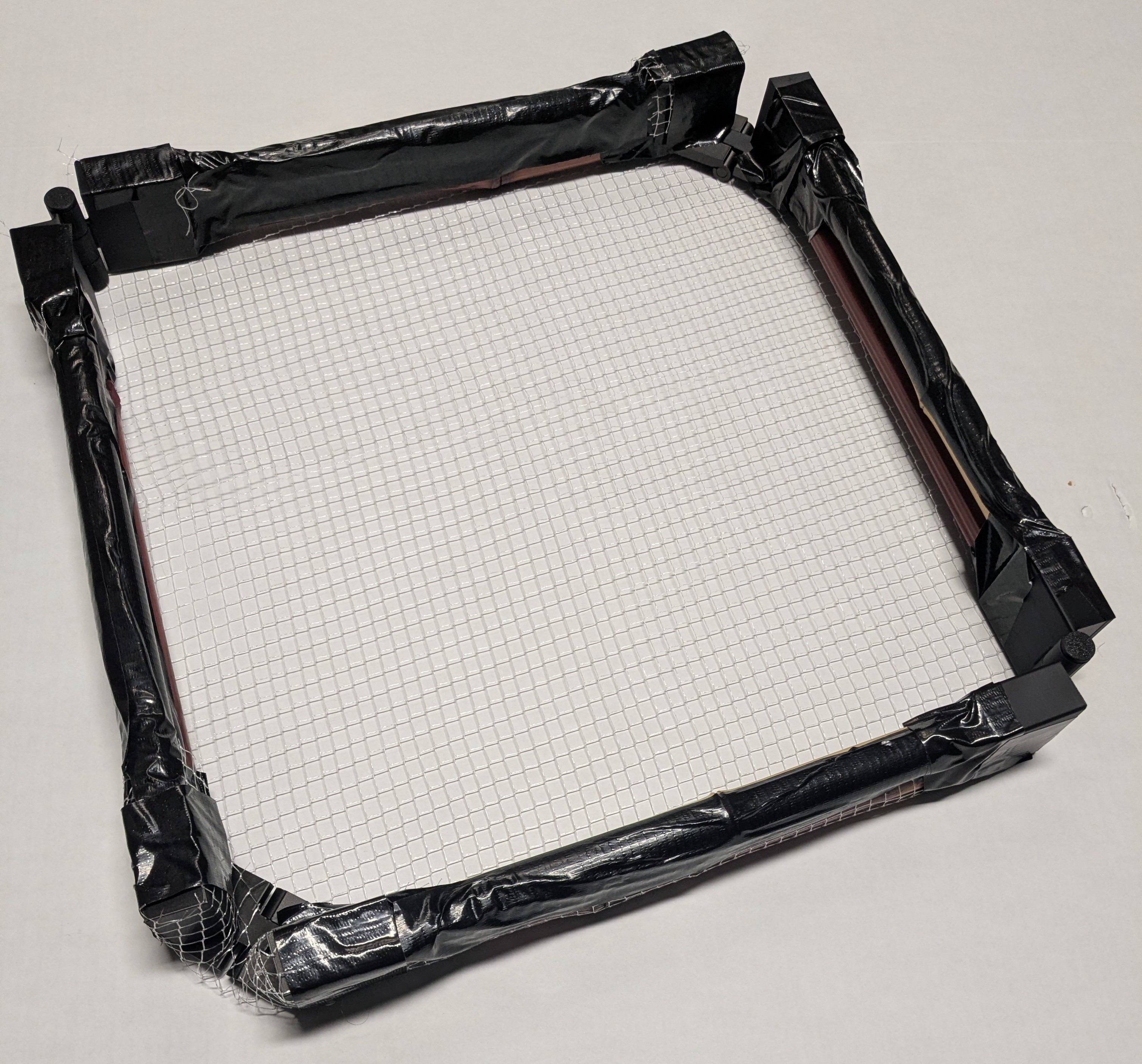
Our team worked together to solve a real problem archaeologists face in the field. After researching online, going on field trips, and talking with archaeologists and experts, we learned that carrying heavy tools over hot, uneven ground is a big challenge. Based on this, we decided to build a lightweight, portable sifter that would be easy to carry and use. e tested different materials, screen sizes, and folding designs, made small models, and sketched our ideas. Then we built and improved several prototypes using bamboo, plastic mesh, and 3D-printed hinges. After testing it with real soil, we created a foldable sifter that is easy to transport and can hold up to 10 pounds.
We built a great robot with forklift design and a number
of attachments. The robot did well. We competed in Newport News, qualified for the State, and
even made
it to the World Festival in Houston! That was awesome!
For the Innovation Project, our team tackled the challenge of oyster restoration in the
Chesapeake Bay.
Oysters are super important for the health of our bay, but they are in danger because of
pollution and habitat loss.
We researched, brainstormed, and developed an innovative solution to bring back our oysters:
S.C.O.R.B.s!
We want to help by:
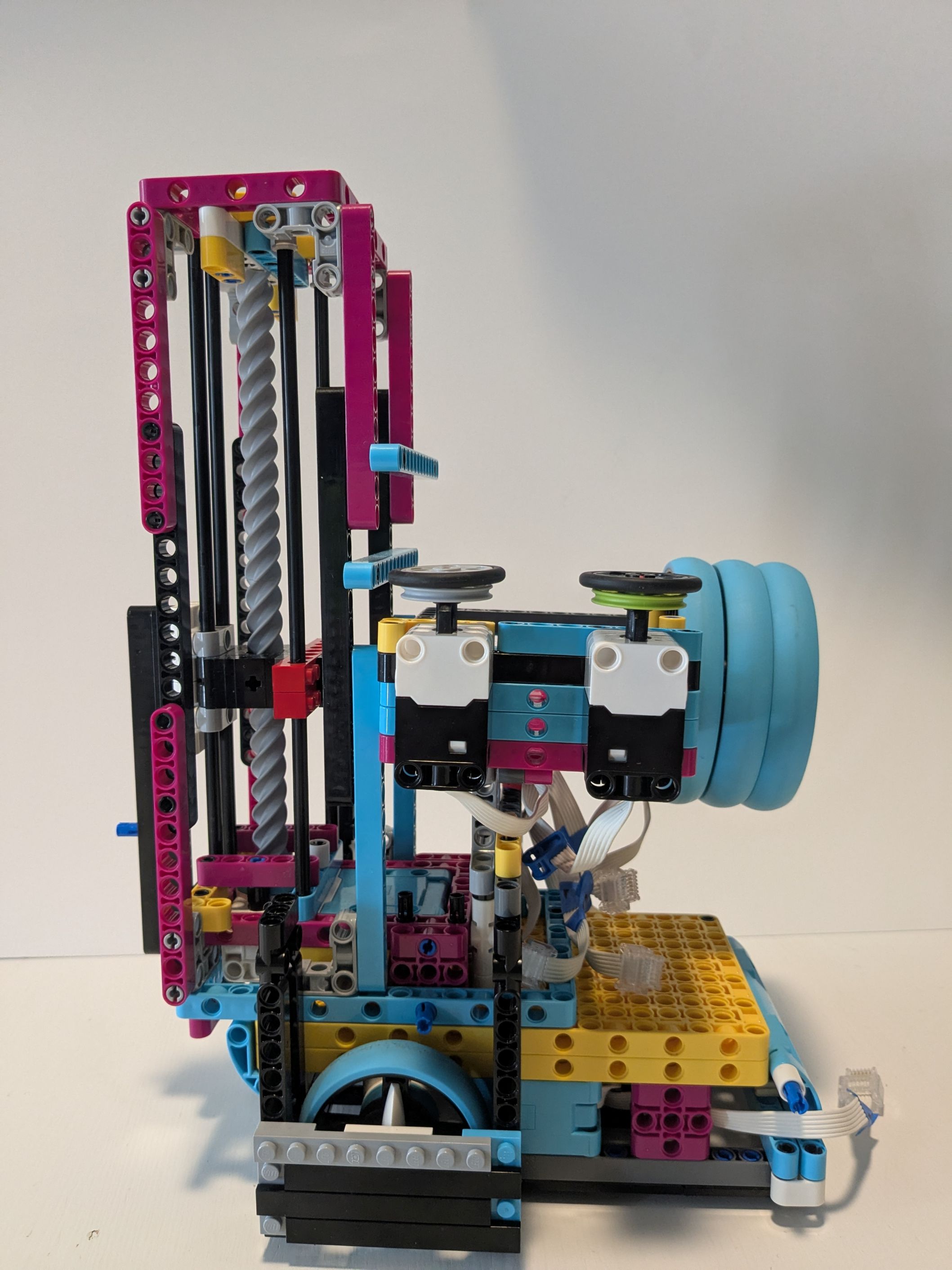
Our 2-wheel drive robot "Ozzy De Oysta" used
a forklift to complete following missions:
We built special attachments to:
It had a flexible bumper to move the Angler Fish and used a peg to pull the Unknown Creature. Additionally, we had two push buttons to lower and raise the forklift if needed.
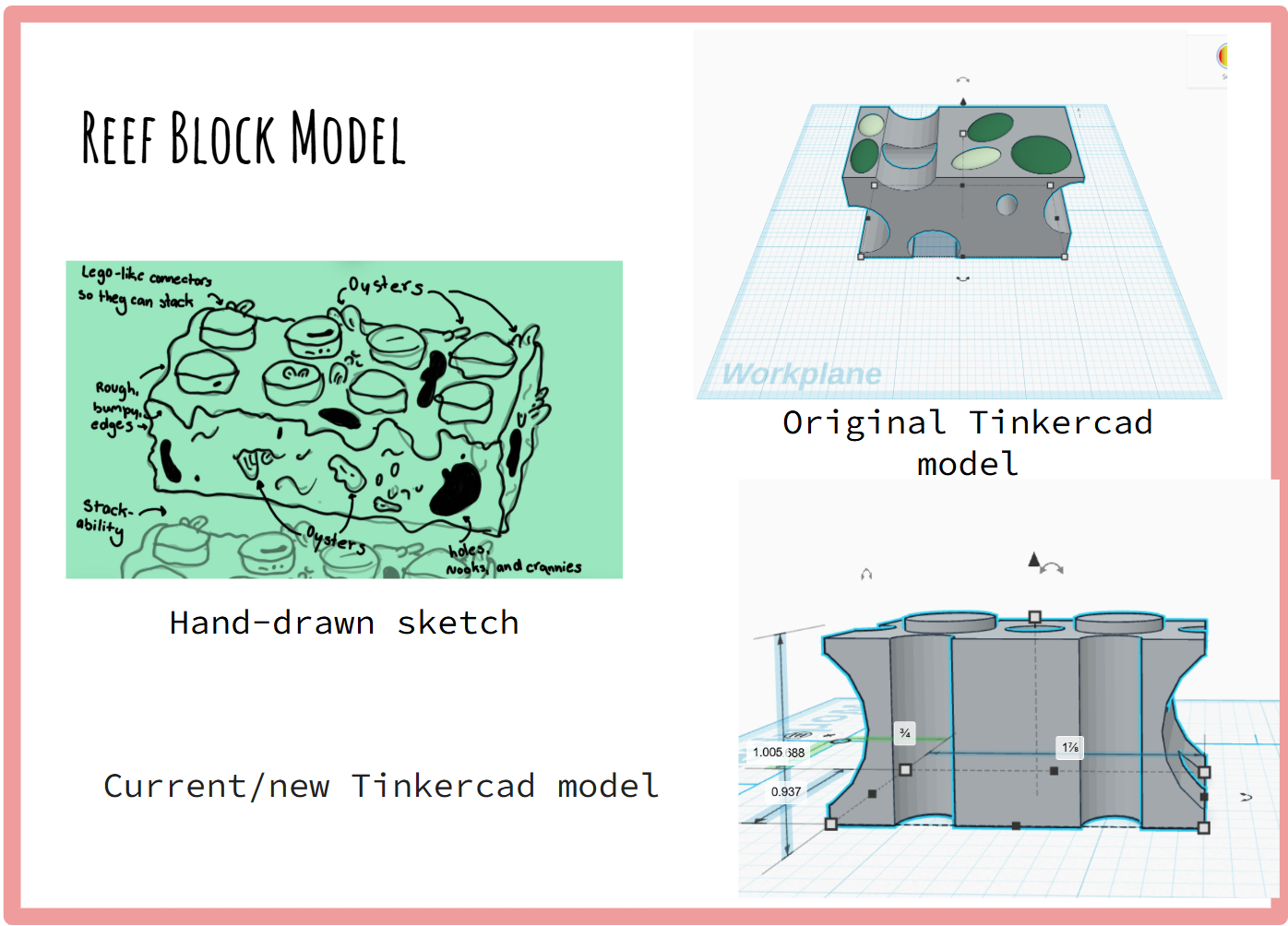
S.C.O.R.B.s (swiss cheese oyster reef blocks) are artificial oyster reef blocks that we designed
to help the regrowth of oysters in our area.
We spoke to two marine biologists (from CNU and VIMS) who helped give us tips and inspire us to
make these. Since oysters grow in tall stacks we
wanted something that’ll match the height oysters in any size. Taking inspiration from Lego we
designed adjustable growth blocks that can match
any size and shape with because of two pegs on the top of the blocks that will connect to other
blocks just like Lego. We wanted to replicate some
of the characteristics of real oyster reefs so we put holes into our blocks because in real
reefs animals live and hide from predators in those holes.
(Swiss cheese because of its holes.)
If we put this into the water it should help the ecosystem just as a real reef should.
In our rookie season, we had a wonderful time with the “MASTERPIECE” challenge. It was a great
learning experience for the team
members as well as the coaches!
We built a creative robot, which
performed well and was able to get about half of all available points.
For our Innovation Project, we promoted Montessori education through
use of a Virtual Reality environment to help people experience
Montessori classrooms. We also proposed hands-on museum exhibits about Montessori learning and
explored LEGO-based Montessori materials. With input from educators and experts, the team
identified ways
to bring Montessori’s hands-on, child-driven methods to more families and communities around the
world.
We learned a ton about teamwork and had a blast competing in our first qualifier. We even made
it to the
State Championship!

We had a 2-wheel drive robot, which used two color sensors to follow the black lines and to
detect the yellow color to find the camera.
It had a claw and a special paddle bumper as well as a tail to flip the dragon.
We wanted to find fun ways to help more people learn about Montessori schools,
so we came up with cool ideas like a Virtual Reality app that lets you explore a classroom,
a hands-on museum full of Montessori materials, and even special LEGO sets that work like real
Montessori tools!
Montessori education is awesome because kids get to choose their own work, use fun materials to
learn, and there are no tests or
homework. So it's way less stressful! Everyone learns to be kind, there's no bullying, and you
even get to go outside and play.
We talked to Montessori teachers and experts in India and Virginia, and even a VR specialist!
They told us the VR app would be helpful, but people want different things like videos and
presentations in India, and interactive materials in the U.S.
Everyone thought a museum exhibit would be amazing for local communities, and they all loved the
idea of LEGO Montessori sets!
We then took one more step! We filmed a 360-degree video of a real Montessori classroom that you
can look around in with a VR headset.